制作一个多旋翼飞行器

制造多旋翼无人机的过程
在介绍无人机的制造过程之前,首先让我们简单了解一下多旋翼飞行器的定义和在无人机中使用的软件。
多旋翼飞行器的定义
四轴飞行器是指有四个旋转机翼(旋翼)的无人机,这些旋翼用于产生升力。每个转子垂直向下,其中两个顺时针旋转,另外两个逆时针旋转。通过调整这些旋翼的转速,我们可以控制多旋翼飞行器的动作。
无人机控制软件
无人机的控制通常依赖于几种开源软件。这些软件各有优缺点,适用于不同需求的用户。以下是三种常用软件的简要介绍:
1. ARDUINO
优点:
- 支持复杂的平面设计。
- 兼容 PC、MacBook、iPhone/iPad 和 Android,并具有统一界面。
- 不强制披露商业用途的源代码。
缺点:
- 遥测无线电设置不便。
- 没有用户友好的电机测试 GUI。
- 无人机初学者接触难度大。
2. BETAFIGHT
优点:
- 提供丰富的赛车无人机控制功能。
- 支持杂技表演,能够实现动态运动。
- 易于初学者理解。
缺点:
- 对于自主控制的支持较弱。
- PID 控制比较灵敏,容易导致电机过热。
- 不适用于遥控飞机等其他无人机。
3. INAV
优点:
- 适合初学者,进入门槛低。
- 专注于 GPS 功能的优化,实现出色的自我控制。
- 可用于遥控飞机控制,飞行摄影质量良好。
缺点:
- 特技飞行能力较弱。
- 对控制 VTOL 等无人机的功能支持较少。
制造多旋翼无人机的步骤
在这里我选择了 INAV 软件,下面是整个制造过程:
所需材料
- STM32F411CEU6
- 跳线公/母
- PCB 焊板
- HMC5883L(罗盘磁力计传感器)
- MPU6050(加速度陀螺仪传感器)
- BMP280(气压高度传感器)
- 排针(母/公)
- FS-1A6B(接收器)
- FLYSKY 遥控器
- 电缆扎带
- ST-LINK V2 下载器
- GPS_NEO6M
- AT2212 无刷电机
- 电调 30A
- 1045 螺旋桨
- F450 无人机框架
- 锂电池 11.1v 2200mah 或 1500mah
- 锂电池充电器
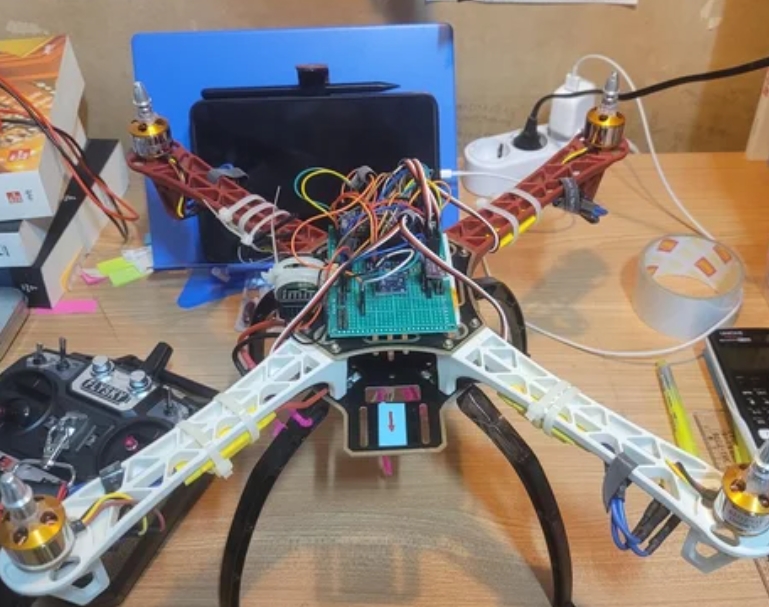
制作步骤
创建控制板
根据接线图,将每个组件连接起来。组装无人机框架
组装 F450 无人机框架,并在其上安装无刷电机、电调和控制板。- 完成无人机机身
设置 FLYSKY 控制器
配置遥控器的输出模式,选择 IBUS 通信方式。遥控器和接收器绑定
按下左侧的圆形按钮并打开 FLYSKY 控制器,确保接收器电源开启。上传固件
通过 ST-LINK V2 将 INAV 无人机源码上传到 STM32F411CEU6 板。与 INAV 软件通信
连接 STM32 板到 PC,开启 INAV 软件,并确保端口正确。设置无人机
配置传感器类型、无人机类型等设置,完成保存和重启。飞行功能设置
选择 ARM 模式、ANGLE 模式及 NAV ALTHOLD 模式来设置降落和飞行功能。测量无人机重量
最后,确保无人机的升力高于总重量。总升力 - 无人机重量 = 可举起的重量
评论 ()
Waline